〓 Admin 〓
バイポーラステッピングモータのトルク制御は、主に次の2つの方法で行われます:
電流制御:
バイポーラステッピングモータでは、電流がモータのトルクに直接関与します。電流制御は、モータに供給される電流の大きさを制御することでトルクを制御します。一般的な方法として、パルス幅変調(PWM)制御やステップごとに電流を設定するマイクロステップ駆動があります。電流を適切に制御することで、モータのトルク特性を最適化し、正確な位置制御や負荷変動に対するトルク応答を改善することができます。
バイポーラステッピングモータでは、電流がモータのトルクに直接関与します。電流制御は、モータに供給される電流の大きさを制御することでトルクを制御します。一般的な方法として、パルス幅変調(PWM)制御やステップごとに電流を設定するマイクロステップ駆動があります。電流を適切に制御することで、モータのトルク特性を最適化し、正確な位置制御や負荷変動に対するトルク応答を改善することができます。
ミクロステップ駆動:
バイポーラステッピングモータでは、ステップ角を更に細かく分割することで、滑らかな運動やトルク応答の向上が可能です。これを実現する方法の一つがミクロステップ駆動です。ミクロステップ駆動では、各ステップをより小さなステップに分割し、その間の電流を制御することで、滑らかな回転やトルク特性の改善を実現します。ミクロステップ駆動は、ステッピングモータの分解能を向上させる一方で、最大トルクが低下する可能性があるため、トルクと分解能のバランスを考慮する必要があります。
バイポーラステッピングモータでは、ステップ角を更に細かく分割することで、滑らかな運動やトルク応答の向上が可能です。これを実現する方法の一つがミクロステップ駆動です。ミクロステップ駆動では、各ステップをより小さなステップに分割し、その間の電流を制御することで、滑らかな回転やトルク特性の改善を実現します。ミクロステップ駆動は、ステッピングモータの分解能を向上させる一方で、最大トルクが低下する可能性があるため、トルクと分解能のバランスを考慮する必要があります。
これらの制御方法を組み合わせることで、バイポーラステッピングモータのトルク制御を最適化することができます。電流制御によってモータのトルク特性を最適化し、ミクロステップ駆動によって滑らかな運動や高分解能を実現することができます。ただし、トルク制御はモータの設計やドライバの特性にも依存するため、適切なパラメータ設定や実験的な調整が必要な場合があります。
PR
ステッピングモーターを冷却するためのいくつかの方法があります。以下に一部を紹介させていただきます:
風冷:
ステッピングモーターに冷却ファンを取り付けて、周囲の空気を循環させる方法です。冷却ファンはモーターの周囲に取り付けられ、空気を吹き込んだり排出したりして、モーターの熱を効果的に放熱します。
ヒートシンク:
ヒートシンクは、ステッピングモーターの熱を効果的に放熱するための装置です。モーターの熱を吸収し、大きい表面積を持つ冷却フィンを通じて熱を放散します。ヒートシンクは一般的にアルミニウムなどの高熱伝導性の材料で作られています。
液体冷却:
ステッピングモーターを液体で冷却する方法です。冷却液(通常は冷却液や冷却油)をモーターの周囲に循環させ、熱を吸収して冷却します。液体冷却は高負荷や長時間の運転において効果的な冷却方法ですが、適切な冷却装置やポンプなどが必要です。
温度制御:
ステッピングモーターの冷却には、温度制御システムを使用することもあります。温度センサーをモーターに取り付け、モーターの温度を監視します。温度が一定の閾値を超えると、冷却装置が自動的に作動し、モーターを冷却します。
これらの冷却方法は、ステッピングモーターの熱を効果的に管理し、モーターの性能や寿命を向上させるのに役立ちます。適切な冷却方法は、ステッピングモーターの仕様や運転条件に応じて選択されるべきです。また、冷却方法を適用する際には、モーターの設置環境や周囲の温度なども考慮する必要があります。
中空ステッピングモータは、一般的なステッピングモータと比較して、特定の特徴を持っています。以下に中空ステッピングモータの主な特徴を説明します。
中空構造:
中空ステッピングモータは、その名前の通り、中心部に空洞(中空)を持っています。この中空構造により、モータの軸が通過できるため、ケーブル、シャフト、パイプ、光ファイバーなど、他の部品や装置を通すことができます。この特性は、回転機構や配線の組み込みにおいて非常に便利です。

(写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 33Ncm (46.74oz.in) 2.0A 35x35x48mm)
(写真の由来:Nema 14 中空シャフト ステッピングモーター バイポーラ 双轴 33Ncm (46.74oz.in) 2.0A 35x35x48mm)
高トルクと高精度:
中空ステッピングモータは、一般的なステッピングモータと同様に、高いトルクと高い位置決め精度を提供します。ステッピングモータの特性であるステップ単位の回転により、正確な位置制御が可能です。これにより、産業機械や精密機器などのアプリケーションにおいて、高い制御性能が要求される場合に使用されます。
コンパクトな設計:
中空ステッピングモータは、一般的にコンパクトな設計をしています。モータの中心部が空洞になっているため、スペースの制約のあるシステムや装置に適しています。また、中空構造により、軽量化も実現できます。
高い応答性:
ステッピングモータは、信号パルスに応じてステップ単位で回転するため、高い応答性を持ちます。信号の変化に迅速に応じて回転を開始し、停止することができます。この特性は、高速位置決めやリアルタイム制御が必要なアプリケーションに適しています。
無補助保持力:
中空ステッピングモータは、ステップモードで停止した場合にも、一定の保持力を持ちます。このため、モータを電力を供給せずに静止させることができます。例えば、パン・チルト台座やロボットアームの関節など、保持力が必要な場面で有用です。
中空ステッピングモータは、産業機械、医療機器、ロボット、半導体製造装置、映像装置など、さまざまなアプリケーションで使用されています。特に、回転軸を通す必要があるシステムや、空間効率を重視する場面で広く利用されています。
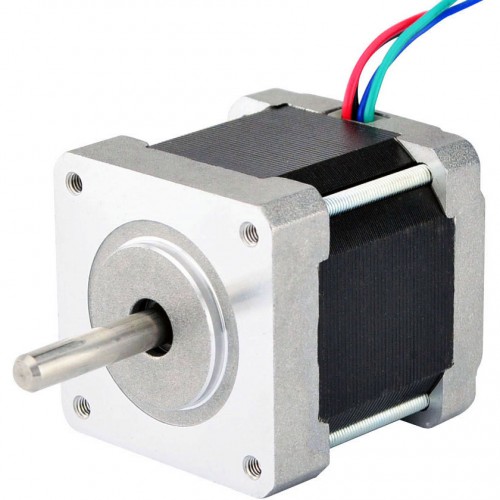
バイポーラステッピングモータは、ステッピングモータの一種であり、一般的に以下のような構造を持ちます:
固定子(ステータ):
バイポーラステッピングモータの固定子は、コイルが巻かれたステータコア(鉄心)で構成されています。ステータコアは複数の磁極を持ち、通常は2つの対向する磁極(N極とS極)を持つものが使用されます。
ロータ:
ロータは、固定子の内側に位置し、回転する部分です。ロータは通常、一連の永久磁石で構成されており、N極とS極が交互に配置されています。ロータの磁極の数は、ステップ数と関連しています。
ロータ軸:
ロータは、回転軸に取り付けられています。この軸は、モーターの回転を伝える役割を果たします。
ロータ歯:
ロータの磁極には、固定子の磁極と対応するように設計された歯(ティース)があります。これらの歯は、固定子の磁極によって引き寄せられることで、回転運動が生じます。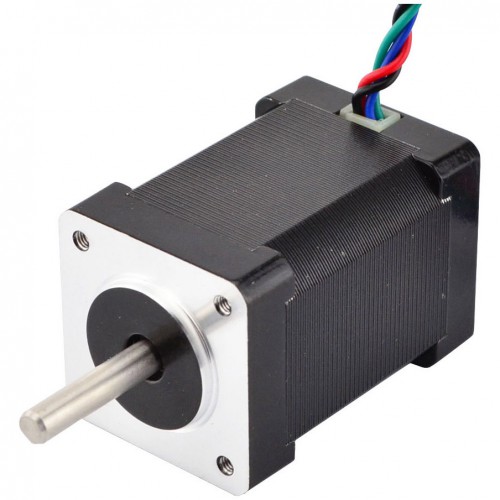
(写真の由来:Nema 14 バイポーラステッピングモーター 1.8°40Ncm (56.7oz.in) 1.5A 4.2V 35x35x52mm 4 ワイヤー)
(写真の由来:Nema 14 バイポーラステッピングモーター 1.8°40Ncm (56.7oz.in) 1.5A 4.2V 35x35x52mm 4 ワイヤー)
ワイヤコイル:
バイポーラステッピングモータの固定子には、複数のコイルが巻かれています。これらのコイルは、電流が流れることで磁界を発生させ、ロータを引き寄せる力を生み出します。
バイポーラステッピングモータは、固定子のコイルに順方向または逆方向の電流を流すことによって、ロータの磁極を引き寄せ、正確なステップ運動を実現します。このような構造により、ステッピングモータは精密な位置制御が可能であり、3Dプリンターなどの応用に広く使用されています。
リニアステッピングモータは、ステッピングモータの一種であり、回転運動ではなく直線運動を実現するために設計されています。以下に、リニアステッピングモータの特徴をいくつか挙げます:
直線運動:
リニアステッピングモータは、回転運動ではなく直線的な運動を提供します。これにより、直線的な位置制御が必要なアプリケーションに適しています。例えば、3Dプリンターや高精度なポジショニングシステムなどで使用されます。
ステップモード:
リニアステッピングモータは、ステップモードと呼ばれる微小なステップで運動を制御します。これにより、高精度な位置制御が可能であり、微細な移動や位置の微調整が可能です。
写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504DC5-150RS 0.02Nm ねじリード 4mm(0.1575") 長さ 150mm
写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504DC5-150RS 0.02Nm ねじリード 4mm(0.1575") 長さ 150mm
高精度:
リニアステッピングモータは、ステップモードによる制御のため、高い位置決めの精度を実現します。特に、マイクロステップドライバと組み合わせることで、より滑らかな運動や高い解像度を実現できます。
高応答性:
リニアステッピングモータは、ステップ指令に対して高い応答性を持ちます。ステップ指令を瞬時に受け取り、位置への移動をすばやく開始するため、リアルタイムな制御が可能です。
無補助メカニズム:
リニアステッピングモータは、直線運動を実現するために専用のメカニズムやギアなどの補助装置を必要としません。そのため、シンプルな構造であり、コンパクトなサイズを実現できます。
静音性:
リニアステッピングモータは、ステップモードによる運動制御のため、通常は比較的静音に動作します。特に、マイクロステップドライバの使用や適切な制御回路の設計によって、騒音をさらに低減することができます。
これらの特徴により、リニアステッピングモータは、高精度な直線運動制御が必要なアプリケーションに適しています。その例としては、3Dプリンティング、レーザーカッター、医療機器、精密検査装置、自動化装置などがあります。
プロフィール
HN:
No Name Ninja
性別:
非公開
最新記事
(07/16)
(07/09)
(07/04)
(06/26)
(06/20)
P R