〓 Admin 〓
リニアステッピングモータを選ぶ際に考慮すべき要素は以下の通りです:
必要な性能要件:まず、アプリケーションの要件を明確にしましょう。必要な移動速度、加速度、トルク、精度などの性能要件を特定します。これによって、適切なリニアステッピングモータのタイプやサイズを選択することができます。
ピッチ(ステップ角):リニアステッピングモータのピッチ(ステップ角)は、移動距離を制御するための基本単位です。ピッチが小さいほど、移動の細かい制御が可能ですが、その分精度やトルクが低下することもあります。アプリケーションの要件に基づいて、適切なピッチを選択します。

「写真の由来:NEMA 8 エクスターナルリニアステッピングモータ 8E15S0504AC5-100RS 0.02Nm ねじリード 2mm(0.07874") 長さ 100mm」
「写真の由来:NEMA 8 エクスターナルリニアステッピングモータ 8E15S0504AC5-100RS 0.02Nm ねじリード 2mm(0.07874") 長さ 100mm」
接続方式:リニアステッピングモータは、バイポーラ接続またはユニポーラ接続のいずれかで駆動されます。バイポーラ接続はトルクが高く、精度が高い一方、駆動回路が複雑になります。ユニポーラ接続は駆動回路が簡単ですが、トルクや精度がやや低下する場合があります。アプリケーションの要件と駆動回路の設計に基づいて、適切な接続方式を選択します。
駆動方式:リニアステッピングモータは、オープンループ駆動またはクローズドループ駆動のいずれかで使用することができます。オープンループ駆動は、位置フィードバックの使用せずに駆動する方法で、コストが低くシンプルですが、位置の正確性に制約があります。クローズドループ駆動は、位置フィードバックを使用して位置の正確性を確保する方法で、高い精度が求められるアプリケーションに適しています。アプリケーションの要件と予算に基づいて、適切な駆動方式を選択します。
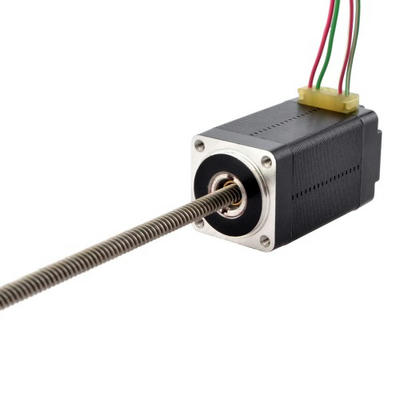
「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504DC5-150RS 0.02Nm ねじリード 4mm(0.1575") 長さ 150mm」
「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504DC5-150RS 0.02Nm ねじリード 4mm(0.1575") 長さ 150mm」
環境条件:リニアステッピングモータは、使用する環境条件に適合している必要があります。温度範囲、振動、衝撃、防塵性、防水性などの要件を考慮し、適切な防護や耐久性を備えたモーターを選択します。
メーカーの評判とサポート:信頼性や品質を確保するために、信頼性のあるメーカーからの製品を選択することが重要です。また、メーカーのサポートや技術サービスも考慮に入れてください。
以上の要素を考慮しながら、アプリケーションの要件に最も適したリニアステッピングモータを選択することが重要です。必要に応じて、メーカーや専門家との相談や試験を行うこともおすすめです。
PR
サーボモーターの制御原理は、フィードバック制御システムに基づいています。以下に一般的なサーボモーターの制御原理を説明します。
目標値の設定:
制御系では、まず目標値を設定します。これは、サーボモーターが到達すべき位置や速度などの指定です。
制御系では、まず目標値を設定します。これは、サーボモーターが到達すべき位置や速度などの指定です。
フィードバックセンサー:
サーボモーターは、位置や速度などの情報をフィードバックセンサーによって検出します。一般的なフィードバックセンサーには、エンコーダやホール効果センサーがあります。これらのセンサーは、モーターの回転角度や速度を測定し、制御系に情報を送ります。

「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
サーボモーターは、位置や速度などの情報をフィードバックセンサーによって検出します。一般的なフィードバックセンサーには、エンコーダやホール効果センサーがあります。これらのセンサーは、モーターの回転角度や速度を測定し、制御系に情報を送ります。
「写真の由来:E6シリーズ 400W ACサーボモーター&ドライバーキット 3000rpm 1.27Nm 17ビットエンコーダー IP65」
エラーの計算:
制御系では、目標値とフィードバックセンサーから得られた情報を比較し、エラーを計算します。エラーは、目標値と現在の状態(フィードバックセンサーからの情報)との差を表します。
制御系では、目標値とフィードバックセンサーから得られた情報を比較し、エラーを計算します。エラーは、目標値と現在の状態(フィードバックセンサーからの情報)との差を表します。
制御信号の生成:
エラーをもとに、制御系は制御信号を生成します。制御信号は、モーターに供給される電圧や電流のパルスです。制御信号は、モータードライバや制御回路を介してモーターに送られます。
エラーをもとに、制御系は制御信号を生成します。制御信号は、モーターに供給される電圧や電流のパルスです。制御信号は、モータードライバや制御回路を介してモーターに送られます。
モーターへの応答:
モーターは、受け取った制御信号に応じて動作します。制御信号のパルス幅や周波数、位相などによって、モーターの回転角度や速度が制御されます。
モーターは、受け取った制御信号に応じて動作します。制御信号のパルス幅や周波数、位相などによって、モーターの回転角度や速度が制御されます。
フィードバックループ:
モーターが動作すると、フィードバックセンサーは新たな情報を検出し、制御系にフィードバックします。制御系は、新たなフィードバック情報をもとにエラーを再計算し、制御信号を調整します。これにより、目標値に近づくようにモーターの制御が継続されます。
モーターが動作すると、フィードバックセンサーは新たな情報を検出し、制御系にフィードバックします。制御系は、新たなフィードバック情報をもとにエラーを再計算し、制御信号を調整します。これにより、目標値に近づくようにモーターの制御が継続されます。
以上のステップを反復することで、サーボモーターは目標値に対して正確な位置制御や速度制御を行います。フィードバック制御により、外部の変動や負荷の変化に対してもモーターの動作を補正し、安定性と正確性を確保します。
小型DCモーターは、直流電源から電力を受け取り、回転運動を生成するための装置です。以下に、小型DCモーターの基本的な仕組みを説明します。
磁場の生成: 小型DCモーターには、一般的に永久磁石が内部に取り付けられています。この永久磁石によって、モーター内部に磁場が生成されます。永久磁石は通常、円環状やバー状の形状をしており、モーターの固定部分(ステータ)に取り付けられます。
コイルとコミュテータ: モーターの回転部分(ロータ)には、コイルが取り付けられています。このコイルは、電流を流すことによって磁場を生成します。また、コミュテータ(コミュテータリングリング)と呼ばれる装置もロータに取り付けられており、電流の方向を制御します。
電流の供給: モーターには外部から直流電源が供給されます。電源からの電流は、電気回路を通ってコイルに流れます。コイルに流れる電流によって、コイル周囲の磁場が生成されます。
コミュテータの役割: モーターが回転するためには、コイルの磁場の向きを変える必要があります。ここで、コミュテータが重要な役割を果たします。コミュテータは、回転しながら接触を切り替えるブラシと呼ばれる部品と連動しており、コイルに流れる電流の方向を逆転させます。これによって、コイルが磁場と相互作用し、連続的な回転運動が生じます。
ロータの回転: コイルが磁場と相互作用することで、ロータに回転力が発生します。この回転力は、モーターの軸に取り付けられたギアやプーリなどの機構を通じて、外部の装置や機械と連動して動作します。
以上が小型DCモーターの基本的な仕組みです。モーターの回転速度やトルクは、電流の大きさや磁場の強さなどの要素によって制御されます。小型DCモーターは、電動工具、ロボット、自動車、航空機、家電製品など、さまざまな応用分野で利用されています。
小型DCモーターは、さまざまな利点を持っています。以下にその主な利点を挙げます:
コンパクトなサイズ: 小型DCモーターは、非常にコンパクトで小型な設計が可能です。そのため、制約のある空間や小型デバイスに組み込むことができます。例えば、モバイルデバイス、ロボット、医療機器など、小型化が求められるアプリケーションに適しています。
軽量: 小型DCモーターは、軽量な素材や設計が一般的であります。これにより、装置や機械の軽量化が実現できます。軽量化は、携帯性の向上やエネルギー効率の向上に寄与します。
高効率: 小型DCモーターは、一般的に高い効率で動作します。効率の高さにより、電力の消費が少なくなり、エネルギー効率が向上します。これは、バッテリー駆動のデバイスや省エネルギーのアプリケーションにおいて重要です。
簡単な制御: 小型DCモーターは、比較的簡単な制御が可能です。回転方向の制御や回転速度の制御が容易であり、シンプルな回路で制御することができます。これにより、制御システムの設計や組み込みが容易になります。
安価: 小型DCモーターは、一般的に比較的低コストで入手可能です。大量生産されているため、市場で広く利用されています。低コストで高性能のモーターを手に入れることができるため、コスト効率の良いソリューションを提供します。
小型DCモーターは、広範なアプリケーションで利用されており、その利点によってさまざまな産業やデバイスで重要な役割を果たしています。
バイポーラステッピングモータは、ステッピングモータの一種であり、一般的に以下のような構造を持ちます:
固定子(ステータ):
バイポーラステッピングモータの固定子は、コイルが巻かれたステータコア(鉄心)で構成されています。ステータコアは複数の磁極を持ち、通常は2つの対向する磁極(N極とS極)を持つものが使用されます。
ロータ:
ロータは、固定子の内側に位置し、回転する部分です。ロータは通常、一連の永久磁石で構成されており、N極とS極が交互に配置されています。ロータの磁極の数は、ステップ数と関連しています。
ロータ軸:
ロータは、回転軸に取り付けられています。この軸は、モーターの回転を伝える役割を果たします。
ロータ歯:
ロータの磁極には、固定子の磁極と対応するように設計された歯(ティース)があります。これらの歯は、固定子の磁極によって引き寄せられることで、回転運動が生じます。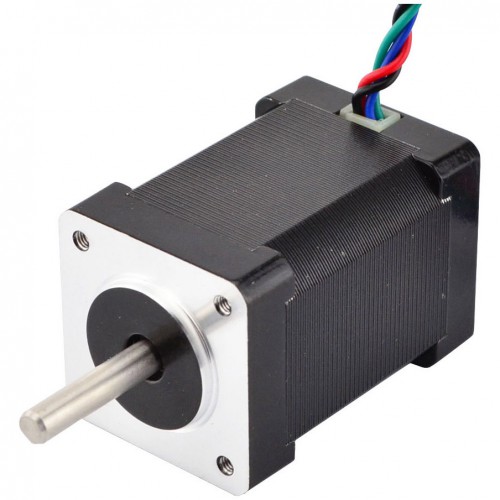
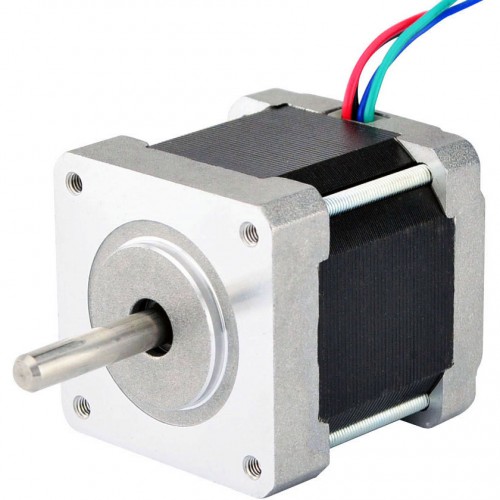
(写真の由来:Nema 14 バイポーラステッピングモーター 1.8°40Ncm (56.7oz.in) 1.5A 4.2V 35x35x52mm 4 ワイヤー)
(写真の由来:Nema 14 バイポーラステッピングモーター 1.8°40Ncm (56.7oz.in) 1.5A 4.2V 35x35x52mm 4 ワイヤー)
ワイヤコイル:
バイポーラステッピングモータの固定子には、複数のコイルが巻かれています。これらのコイルは、電流が流れることで磁界を発生させ、ロータを引き寄せる力を生み出します。
バイポーラステッピングモータは、固定子のコイルに順方向または逆方向の電流を流すことによって、ロータの磁極を引き寄せ、正確なステップ運動を実現します。このような構造により、ステッピングモータは精密な位置制御が可能であり、3Dプリンターなどの応用に広く使用されています。
プロフィール
HN:
No Name Ninja
性別:
非公開
最新記事
(07/16)
(07/09)
(07/04)
(06/26)
(06/20)
P R